Agile and Dynamic Interactions for Mobile Manipulation
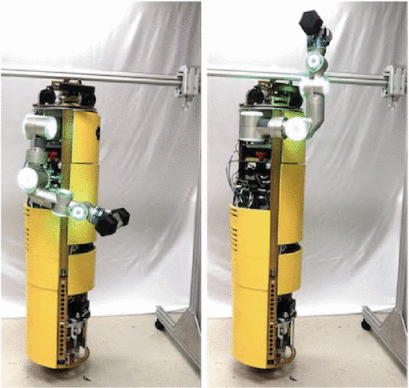
This project is focused on the development of robots that can safely and efficiently work alongside people in crowded spaces using the Ballbot Platform. This project is a collaboration with Professors Ralph Hollis and Nancy Pollard.
Relevant publications
Agriculture Interaction

The agriculture interaction project is focused on picking specialty crops such as apples in unconstrained and heavily occluded environments by modeling and manipulating flexible objects such as branches. This project is a collaboration with George Kantor.
Relevant publications
Delta Arrays
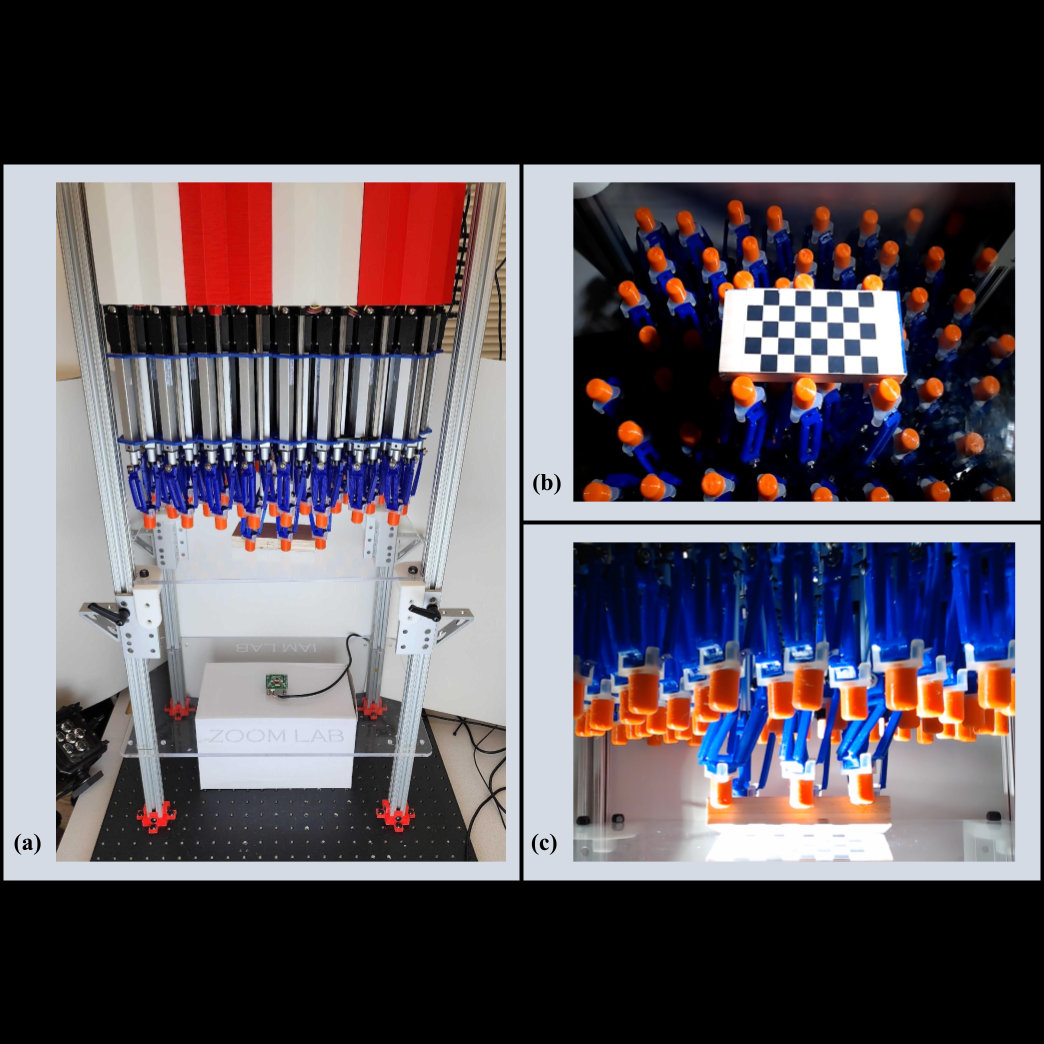
The delta array project uses miniature delta bots on a robot’s end-effector to enhance dexterity in manipulation tasks. We propose a novel manipulator: an 8x8 hexagonal grid of 64 linear soft delta robots, creating a 192 DoF-compliant system. This design explores complex multi-robot dexterous manipulation while maintaining accessibility. The 3D-printed soft TPU links provide mechanical compliance, allowing for safe collisions. Using reinforcement learning, we demonstrate various coordinated distributed manipulations, including translation, alignment, squeezing, lifting, and grasping of diverse objects.
This project collaborates with Professor Zeynep Temel, aiming to develop new manipulation paradigms for real-world complex prehensile and non-prehensile skills.
Relevant publications
Enhancing Dexterity in Robotic Manipulation via Hierarchical Contact Exploration.
Xianyi Cheng, Sarvesh Patil, F. Zeynep Temel, Oliver Kroemer, Matthew T. Mason.
IEEE Robotics and Automation Letters (RA-L), June 2024 pdf
Linear Delta Arrays for Compliant Dexterous Distributed Manipulation.
Sarvesh Patil, Tony Tao, Tess Hellebrekers, Oliver Kroemer, F. Zeynep Temel.
International Conference on Robotics and Automation (ICRA), May 2023 pdf
DeltaZ: An Accessible Compliant Delta Robot Manipulator for Research and Education.
Sarvesh Patil, Samuel C. Alvares, Pragna Mannam, Oliver Kroemer, F. Zeynep Temel.
International Conference on Intelligent Robots and Systems (IROS), Oct 2022 pdf
Delta Hands
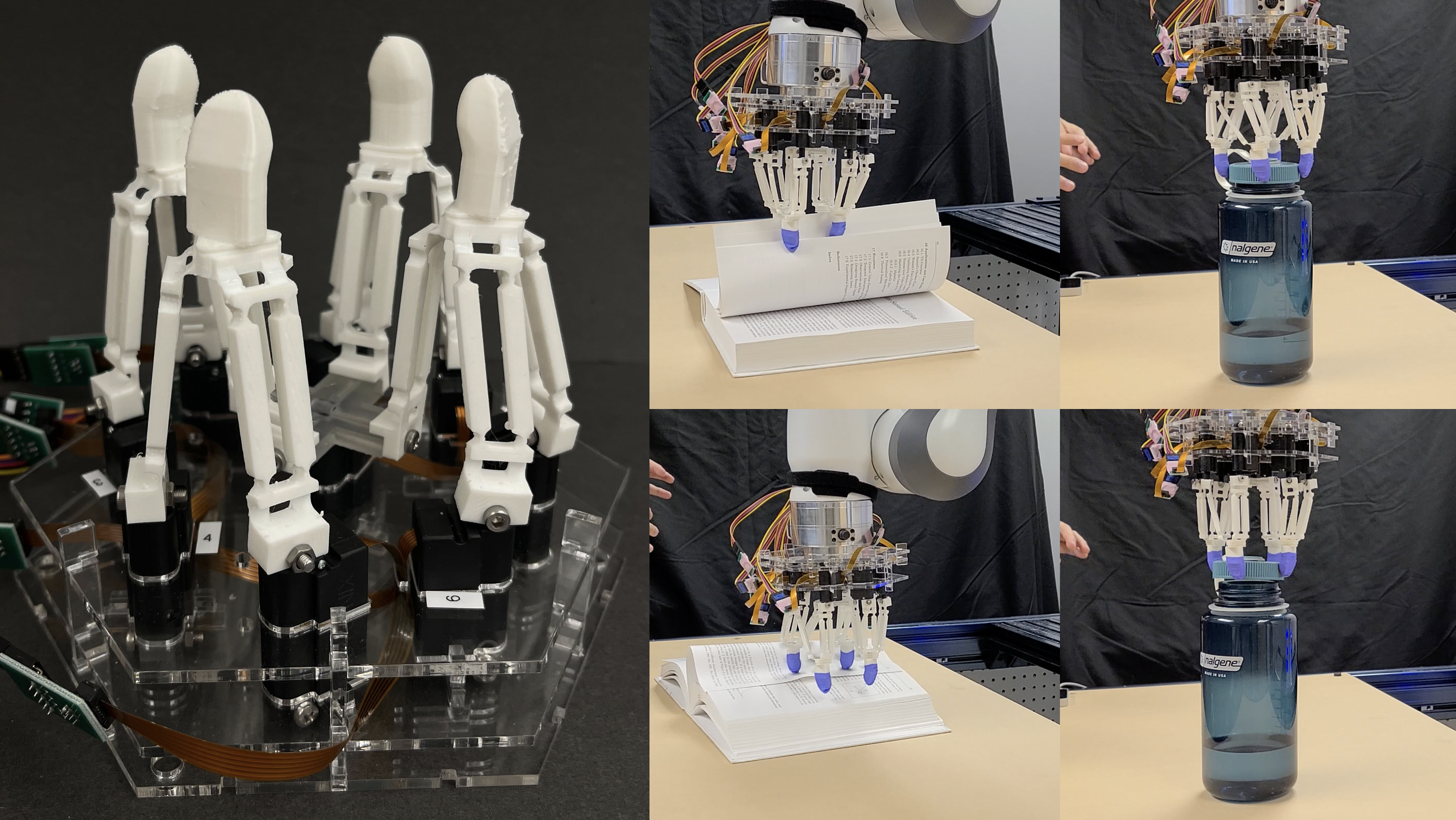
DeltaHand is a synergistic robotic hand platform for dexterous manipulation. By leveraging the modularity of Delta robots, our hands are easy to configure to different degrees of freedom with actuation synergies. The manufacturing is low cost by using off-the-shelf materials (the robot can be manufactured in less than a day and costs under $800). We use soft Delta links for the fingers, and show that our hands can compliantly and safely interact with the environment.
We demonstrate grasping of daily objects using our hand prototypes and teleoperating a 9-actuator Delta hand with a Franka robot arm for dexterous manipulation tasks, we show that we can easily control our hands by leveraging the synergy of our hands while maintaining the necessary dexterity.
Relevant publications
Past Projects
Epson Manufacturing
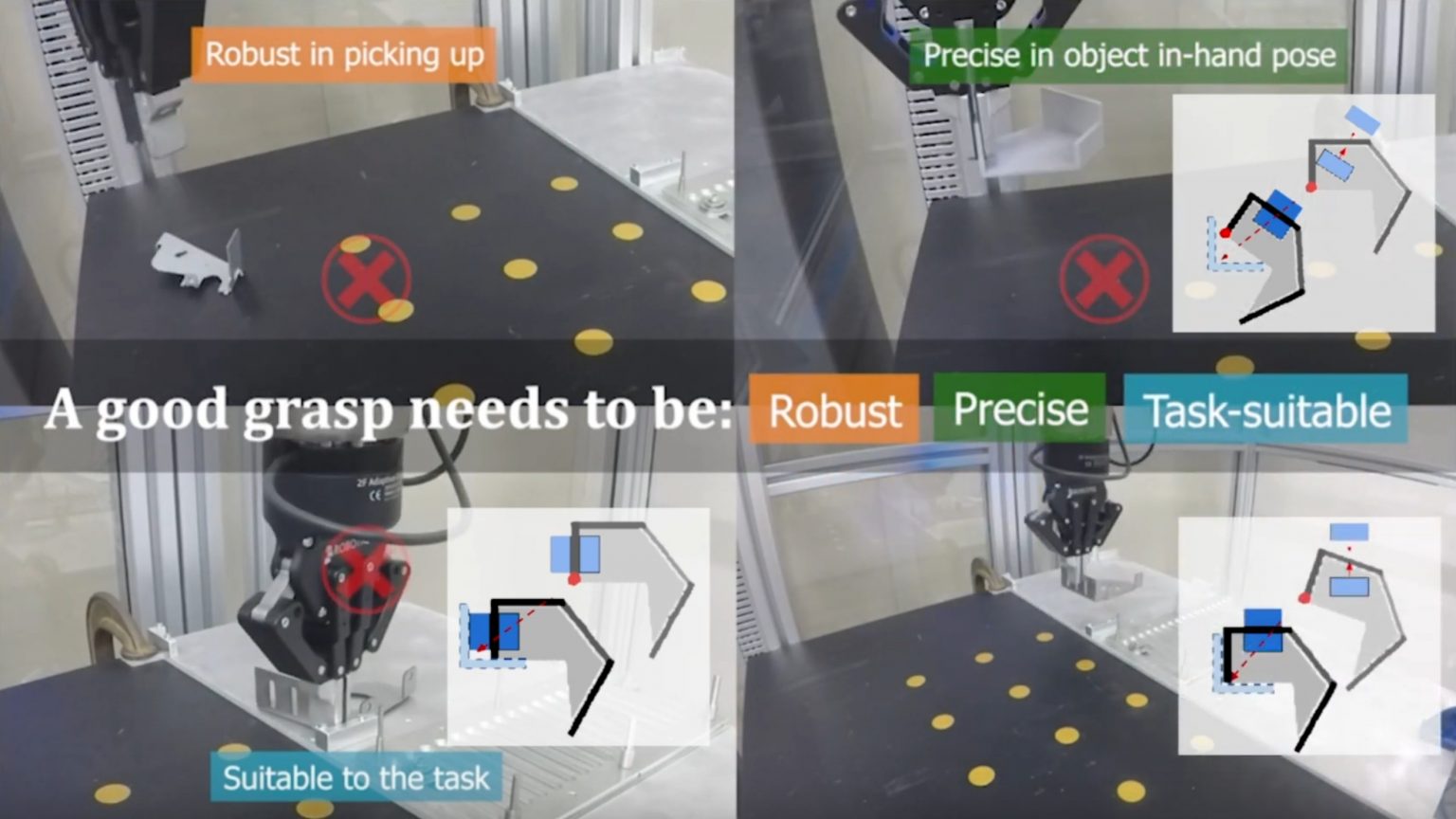
The goal of the Epson project is to use simulators to inform the real robot of better task-oriented grasping locations to reduce uncertainty of the in-hand object pose and achieve high accuracy placement and insertion.
Relevant publications
Planning Integrated with Lifelong Learning for Advanced Robotics
PILLAR is a robotics research project that aims to [project description not visible in the image].
Relevant publications
Sony Gastronomy

The Sony gastronomy project is developing methods for robots to model and learn manipulation skills for preparing food, such as salads. This project is a collaboration with [collaboration details not visible in the image].