Tutorial for Assembly of 2x2 Delta Robot Module
Component list for a 2x2 delta robot module assembly:
| Name | Number | Link |
|---|---|---|
| Actuonix L12 100mm Linear Servo | 12 | |
| FDM printed enclosure | 1 | |
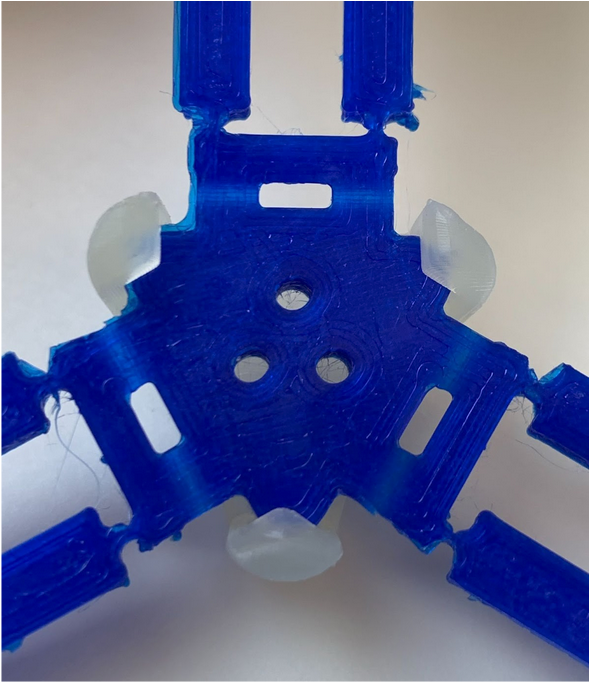
| FDM printed star-shaped mounts | 4 | |
| Adafruit Feather M0 | 1 | |
| Adafruit FeatherWing DC and Stepper Motor Driver | 3 | |
| ADS1015 ADC | 3 | |
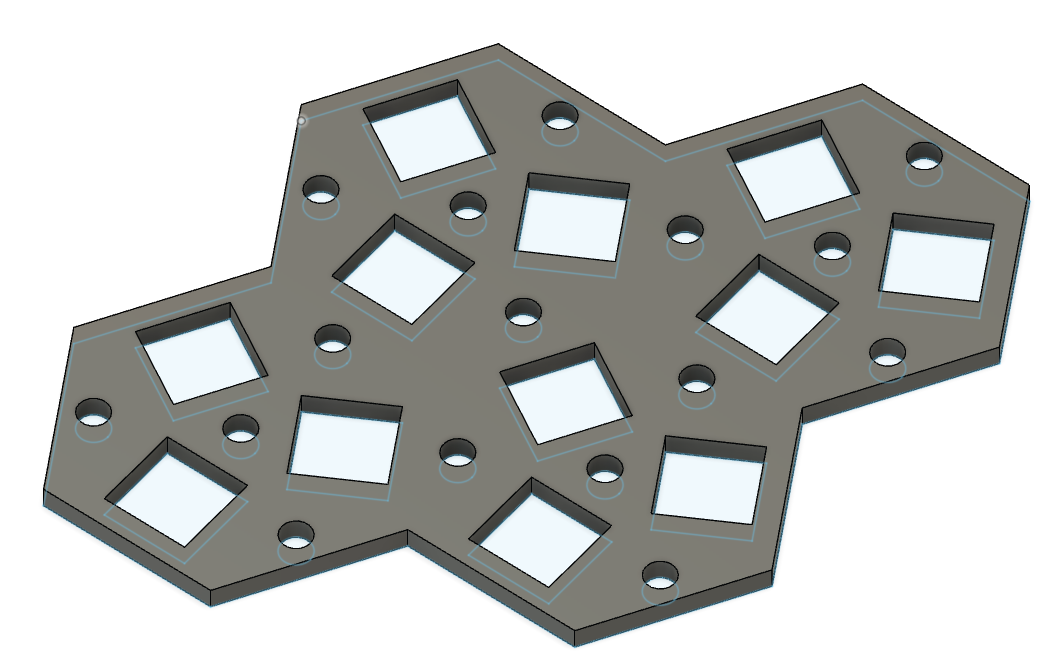
| Plexiglass Delta Module Holder | 1 | |
| 8-32 ½” Button Head Screw (Pack of 100) | 1 | McMaster |
| Female Threaded Standoff 3-½” Long, 8-32 Thread | 5 | McMaster |
| Male-Female Threaded Standoff 1-½” Long, 8-32 Thread | 5 | McMaster |
| 8-32 ⅞” Button Head Screw (Pack of 100) | 1 | McMaster |
| 8-32 Hex Nut (Pack of 100) | 1 | McMaster |
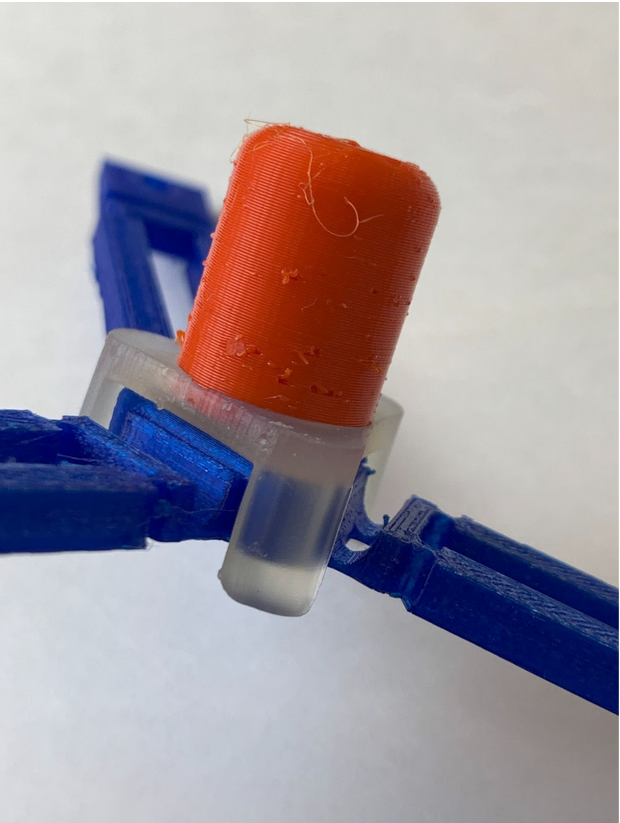
| SLA printed fingertip clip | 4 | |
| FDM printed soft parallelogram links | 4 | |
| FDM printed fingertips | 4 |
Click on the respective images to download their CAD files.
FDM 3D Printed Components
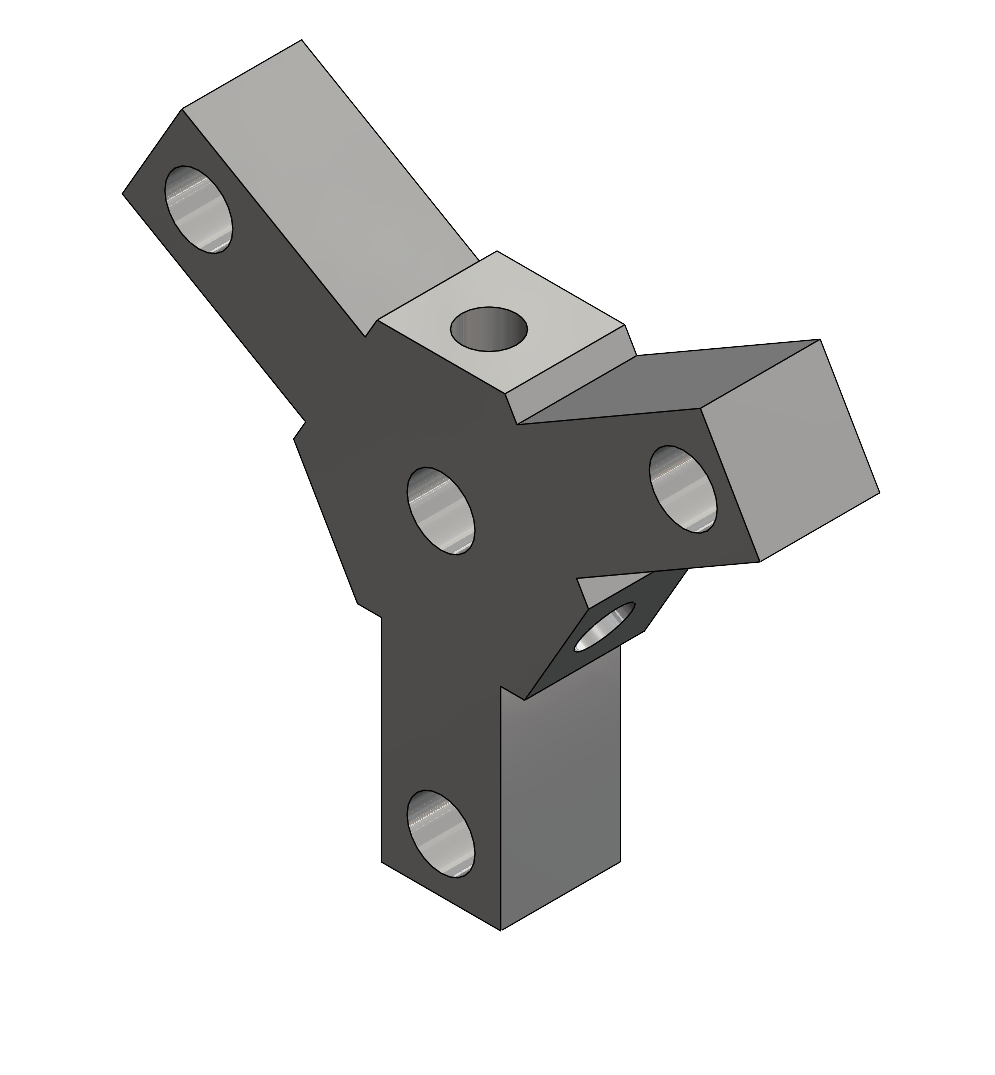
FDM printed star-shaped mounts
FDM printed soft parallelogram links

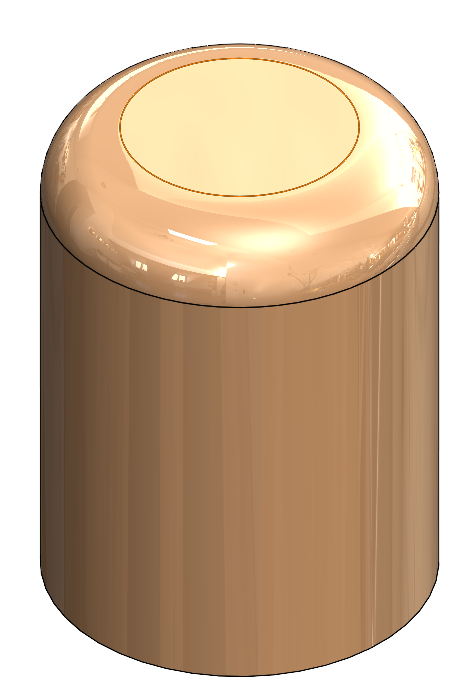
FDM printed fingertips
SLA 3D Printed Components
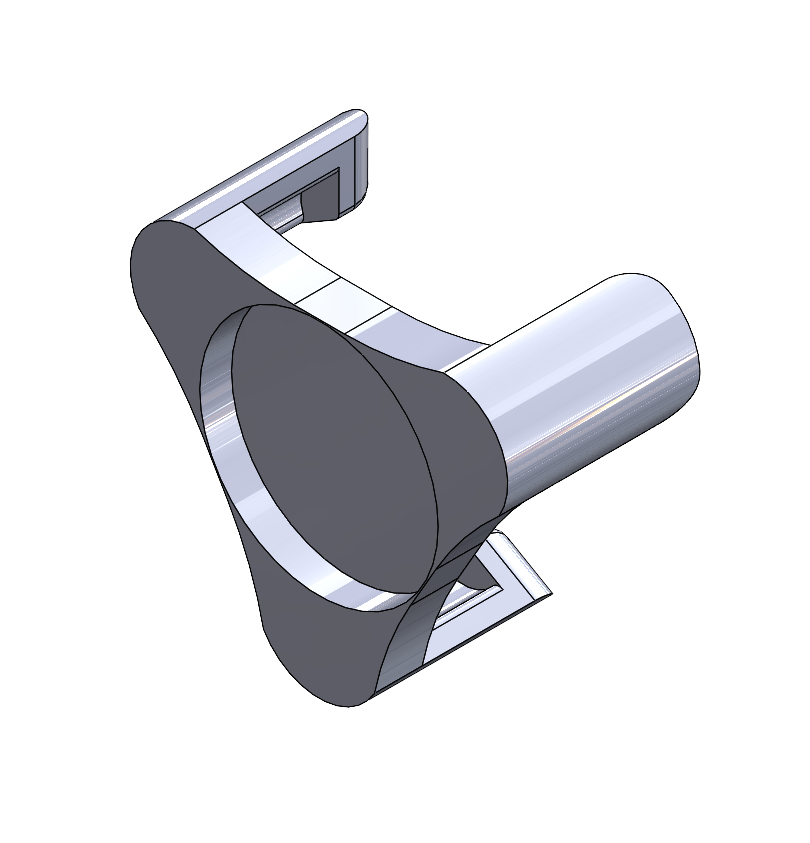
SLA printed fingertip clip
Laser Cut Components
Plexiglass delta robot holder
Orderable Components
Actuators
Actuonix L12 100mm Linear Servo
Electronics
Adafruit FeatherWing DC and Stepper Motor Driver
Power Shield
Assembly
- Attach sets of 3 linear actuators to 4 star-shaped mounts using 8-32 screws.
- Insert the 12 actuators into the square shaped holes of 2 Plexiglass delta robot holders. (note this will be difficult as the tolerances are small)
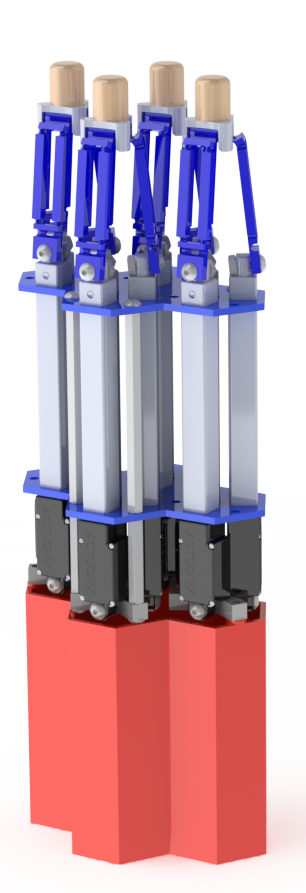
- Attach the 1-½” Long spacers between the star-shaped mounts and the lower plexiglass holders in the formation shown below:
![]()
- Attach the 3-½” Long spacers between the 2 plexiglass holders.
- Attach the delta links to the linear actuators.
- Attach the Fingertip Clip Holders to the end effector plates of the delta robots and super glue the Fingertips on top as shown below:
- Follow along This Guide to learn how to put the electronics together.
- Use the modified delta shield to produce the PCB for distributing the power to all motors, attach ADC and motor drivers similar to single shield design and short all the VCC and GND pins manually.
- The final result should look like this: